Одной из основных задач реабилитации руки является восстановление хватательной функции руки. За счет хватательной функции человек контактирует с окружающим миром, переводя свои желания в действия. И на работе и в быту человеку постоянно приходится брать предметы, перемещать их, поднимать, передавать и т.д.
Для того чтобы взять предмет кисть подстраивается под форму предмета, повторяет ее, делая контакт более плотным и эффективным.
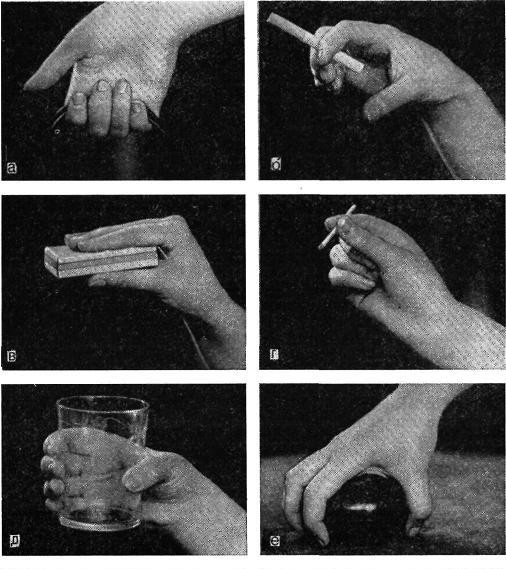
Существует огромное количество захватов, я перечислю основные, на которых нужно акцентироваться в процессе тренировки: а — Крючковидный, б — Межпальцевой, в — Плоскостной, г — Щипковидный, д — Цилиндрический, е — Шаровидный.
В реабилитации после инсульта ряд методик направлены на восстановление хватательной функции руки. Одной из основных является трудовая терапия. Во время занятий каждое упражнение (как и в жизни) включает 2 части: 1 – захват, 2 – действие. Например, задача – попить из стакана. 1 – стакан нужно взять в руку при помощи цилиндрического захвата, 2 – поднять его перед собой, наклонить стакан ко рту, когда стакан на уровне рта.
Захват – плюс – действие.
Но в процессе занятий трудовой терапией очень часто возникает одна проблема – рука никак не может сделать нужный захват и движение, необходимое для выполнения упражнения (захват-плюс-действие) не получается выполнить в полном объеме.
Приходится “вкладывать” предмет здоровой рукой, просить о помощи близких людей, компенсировать движение в кисти за счет движения в других сегментах (плече, локте)…
В принципе, начальные признаки движения есть, но дальше рука не идет и это начальное движение требует больших усилий.
Кажется, кисти нужно просто немного помочь и она будет работать.
Вот бы какое-нибудь устройство, которое могло осуществить эту помощь?
В нашей современном мире появляются такие устройства, и они все больше и больше внедряются в практику и становятся более доступными.
Именно таким устройством-помощником является японская перчатка RoboHand.
Она позволяет осуществлять и силовые, и точностные захваты. Может помогать в выполнении бытовой и профессиональной работы или может служить средством реабилитации, которое расширит возможности верхней конечности.
А расширение функциональных возможностей конечности всегда ведет к улучшению функции в этой конечности.
Будущее реабилитации после инсульта – сплав прикладных устройств и комплекса лечебных тренировок, которые это устройство поможет осуществлять.
Меня лично очень интересуют подобные вещи и сейчас, я решил вступить в один проект, целью которого является внедрение таких вспомогательных устройств реабилитации в жизнь человека после инсульта.
Мы уже работаем над разработкой комплексов упражнений, предназначенных для таких вспомогательных устройств. Т.е. в распоряжении обычного человека будет специализированное терапевтическое сопровождение именно для этого реабилитационного устройств с курсами пошаговых лечебных тренировок.
Как раз одним из первых аппаратов будет перчатка RoboHand.
В связи с этим, я хочу задать вам вопрос: интересно ли вам было бы иметь у себя дома в арсенале такое вспомогательное устройство с сопровождением? Стоит ли этим нам заниматься?
Спасибо. Мне важно ваше мнение пока все стоит на начальном этапе и предстоит большая интересная работа.
Где приобрести перчатку япон.